System-Design

An adaptive sampling alrogithm to find the next best sampling location, and a system integration framework that enables the robotic platform to collect and analyze soil samples efficiently in unknown environments.
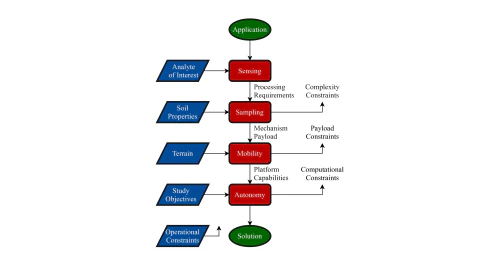
We present a design methodology for creating autonomous systems for contaminated soil sampling and analysis. Overall, this study provides a design guide to aid the selection of system components and algorithms for autonomous characterization of soil contaminants, and presents key technical challenges design into four key components – sensing, sampling, mobility, and autonomy.
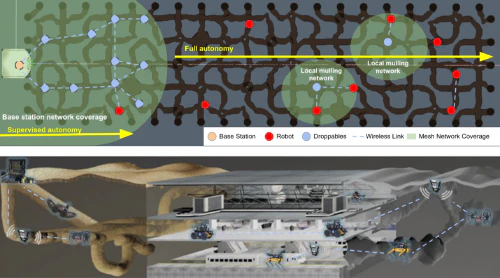
We provide extensions to various modules of the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the the DARPA Subterranean Challenge (i) large-scale geometric and semantic environment mapping; (ii) localization system; (iii) terrain traversability analysis; (iv) large-scale global planning; (v) multi-robot networking; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions.