Soil Monitoring
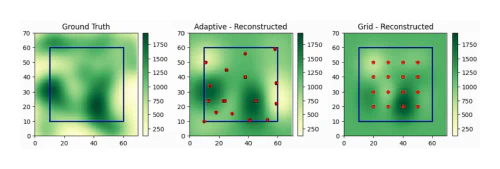
Utilize an extensive simulation enviroment to develop metrics for an adaptive sampling alrogithm that utilizes rapid discrete chemical composition sensors like portable X-ray fluorescence (pXRF) or Laser-Induced Breakdown Spectroscopy (LIBS) to find the next best sampling location.

An adaptive sampling alrogithm to find the next best sampling location, and a system integration framework that enables the robotic platform to collect and analyze soil samples efficiently in unknown environments.
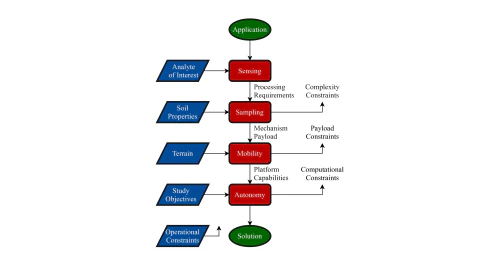
We present a design methodology for creating autonomous systems for contaminated soil sampling and analysis. Overall, this study provides a design guide to aid the selection of system components and algorithms for autonomous characterization of soil contaminants, and presents key technical challenges design into four key components – sensing, sampling, mobility, and autonomy.