Simulation
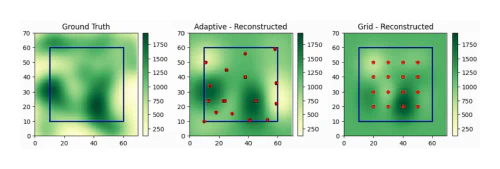
Utilize an extensive simulation enviroment to develop metrics for an adaptive sampling alrogithm that utilizes rapid discrete chemical composition sensors like portable X-ray fluorescence (pXRF) or Laser-Induced Breakdown Spectroscopy (LIBS) to find the next best sampling location.
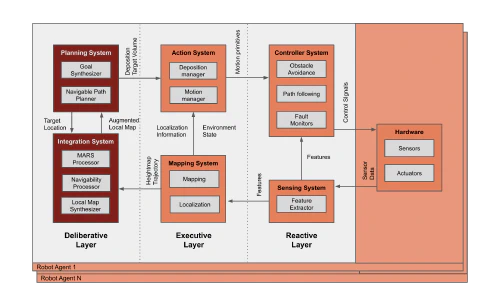
A flexible system architecture, MARSala, that allows fora team of mobile robots to construct motion support structures in large and unstructured environments using local interactions. The proposed architecture provides a means for formulating a construction project as a motion support structure construction problem.
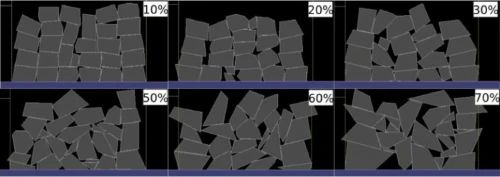
We propose a ”next best step” planning method that autonomously chooses assembly actions to allow construction with objects that contain a significant amount of variation.