Tags/PXRF Analysis
Path to autonomous soil sampling and analysis by ground-based robots
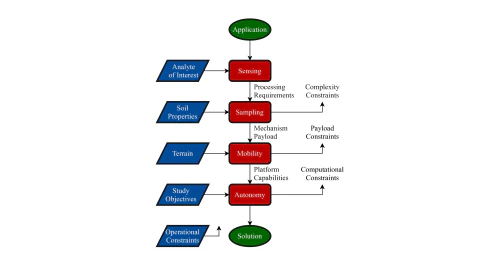
We present a design methodology for creating autonomous systems for contaminated soil sampling and analysis. Overall, this study provides a design guide to aid the selection of system components and algorithms for autonomous characterization of soil contaminants, and presents key technical challenges design into four key components – sensing, sampling, mobility, and autonomy.
Affilation: Carnegie Mellon University