Informative Path Planning
Adaptive Sampling Algorithm for Rapid, Discrete Chemical Analysis Sensors: Metrics, Objectives and Performance Analyses
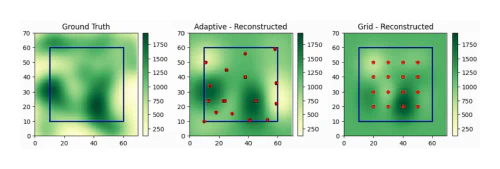
Utilize an extensive simulation enviroment to develop metrics for an adaptive sampling alrogithm that utilizes rapid discrete chemical composition sensors like portable X-ray fluorescence (pXRF) or Laser-Induced Breakdown Spectroscopy (LIBS) to find the next best sampling location.
Affilation: Carnegie Mellon University

Autonomous In-Situ Soil Sampling Using a Ground-Based Robotic System
An adaptive sampling alrogithm to find the next best sampling location, and a system integration framework that enables the robotic platform to collect and analyze soil samples efficiently in unknown environments.
Affilation: Carnegie Mellon University