DARPA SubT
We provide extensions to various modules of the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the the DARPA Subterranean Challenge (i) large-scale geometric and semantic environment mapping; (ii) localization system; (iii) terrain traversability analysis; (iv) large-scale global planning; (v) multi-robot networking; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions.
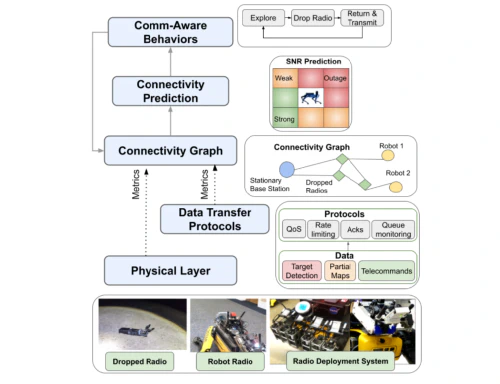
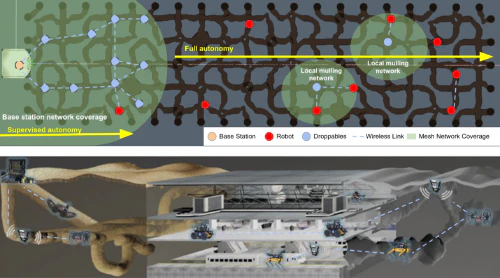
We describe and analyze ACHORD (Autonomous & Collaborative High-Bandwidth Operations with Radio Droppables), a multi-layer networking solution which tightly co-designs the network architecture and high-level decision-making for improved comms. ACHORD provides bandwidth prioritization and timely and reliable data transfer despite intermittent connectivity.