Tags/Compliant Material
Autonomous Adaptive Modification of Unstructured Environments
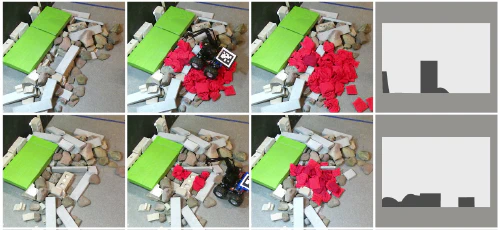
We present and validate a property-driven autonomous system that modifies its environment to achieve and maintain navigability over a highly irregular 3-dimensional terrain. We demonstrate the approach by running the system on a variety of terrains and with mixed materials, including both deformable and rigid components.
Affilation: SUNY Buffalo