Posts

We developed a specialized construction algorithm and robotic system that can autonomously build motion support structures with previously unseen stones. A physics-based planner explicitly considers the uncertainty produced by incomplete in-situ sensing and imprecision during pickup and placement.
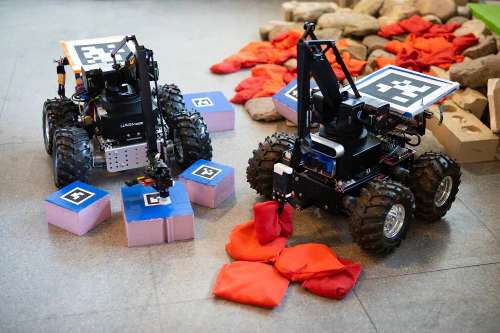
We present a construction model that allows robots with different construction capabilities, using materials of different physical properties and sizes, to modify unstructured environments in a distributed system.
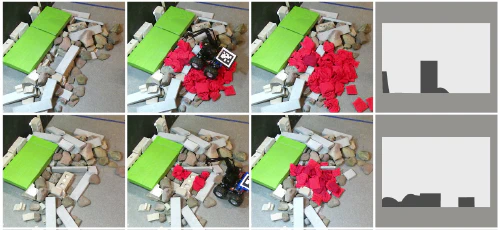
We present and validate a property-driven autonomous system that modifies its environment to achieve and maintain navigability over a highly irregular 3-dimensional terrain. We demonstrate the approach by running the system on a variety of terrains and with mixed materials, including both deformable and rigid components.
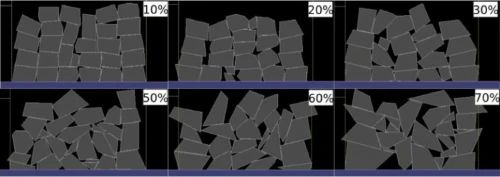
We propose a ”next best step” planning method that autonomously chooses assembly actions to allow construction with objects that contain a significant amount of variation.
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Sed cursus, odio nec venenatis lacinia, lacus lectus varius nisi, in tristique mi purus ut libero.
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Sed cursus, odio nec venenatis lacinia, lacus lectus varius nisi, in tristique mi purus ut libero.