Research
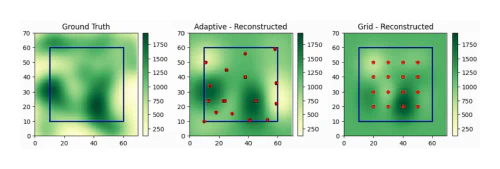
Utilize an extensive simulation enviroment to develop metrics for an adaptive sampling alrogithm that utilizes rapid discrete chemical composition sensors like portable X-ray fluorescence (pXRF) or Laser-Induced Breakdown Spectroscopy (LIBS) to find the next best sampling location.

An adaptive sampling alrogithm to find the next best sampling location, and a system integration framework that enables the robotic platform to collect and analyze soil samples efficiently in unknown environments.
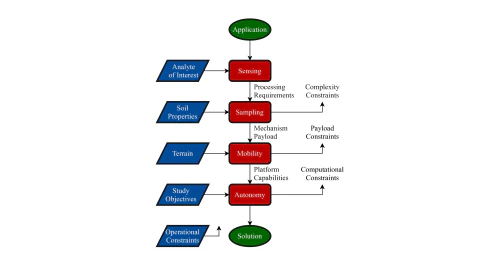
We present a design methodology for creating autonomous systems for contaminated soil sampling and analysis. Overall, this study provides a design guide to aid the selection of system components and algorithms for autonomous characterization of soil contaminants, and presents key technical challenges design into four key components – sensing, sampling, mobility, and autonomy.
We provide extensions to various modules of the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the the DARPA Subterranean Challenge (i) large-scale geometric and semantic environment mapping; (ii) localization system; (iii) terrain traversability analysis; (iv) large-scale global planning; (v) multi-robot networking; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions.
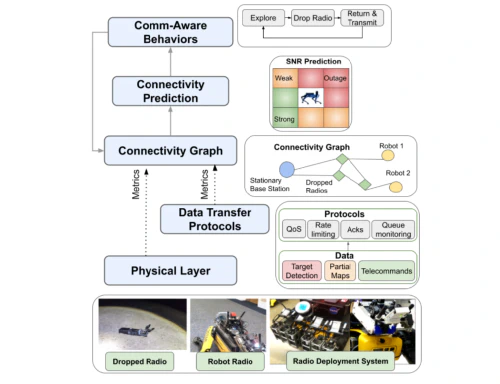
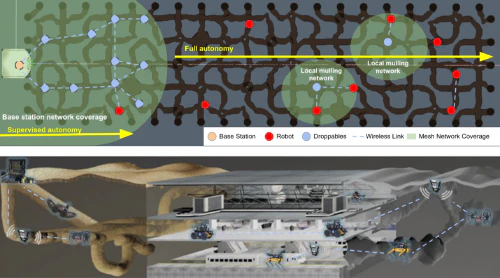
We describe and analyze ACHORD (Autonomous & Collaborative High-Bandwidth Operations with Radio Droppables), a multi-layer networking solution which tightly co-designs the network architecture and high-level decision-making for improved comms. ACHORD provides bandwidth prioritization and timely and reliable data transfer despite intermittent connectivity.
A flexible system architecture, MARSala, that allows fora team of mobile robots to construct motion support structures in large and unstructured environments using local interactions. The proposed architecture provides a means for formulating a construction project as a motion support structure construction problem.